Nxt 4 axis robot arms

Forest Ave, Tempe, Arizona, jewillem asu. Furthermore, as long as the robots are intuitively designed, they can be adapted and used in the future for different maneuvers as well. Therefore, a more complex Simulink model can be developed for controller design purposes. While most of them have been used for controller design [15], [16], nxt 4 axis robot arms and signal processing manipulation [18], the number of articles found for teaching basic robotic concepts is lacking. However, since the robotic arm is not very sturdy and the sensor is nxt 4 axis robot arms sensitive, a post-processing step of the signal was required to smooth it out.
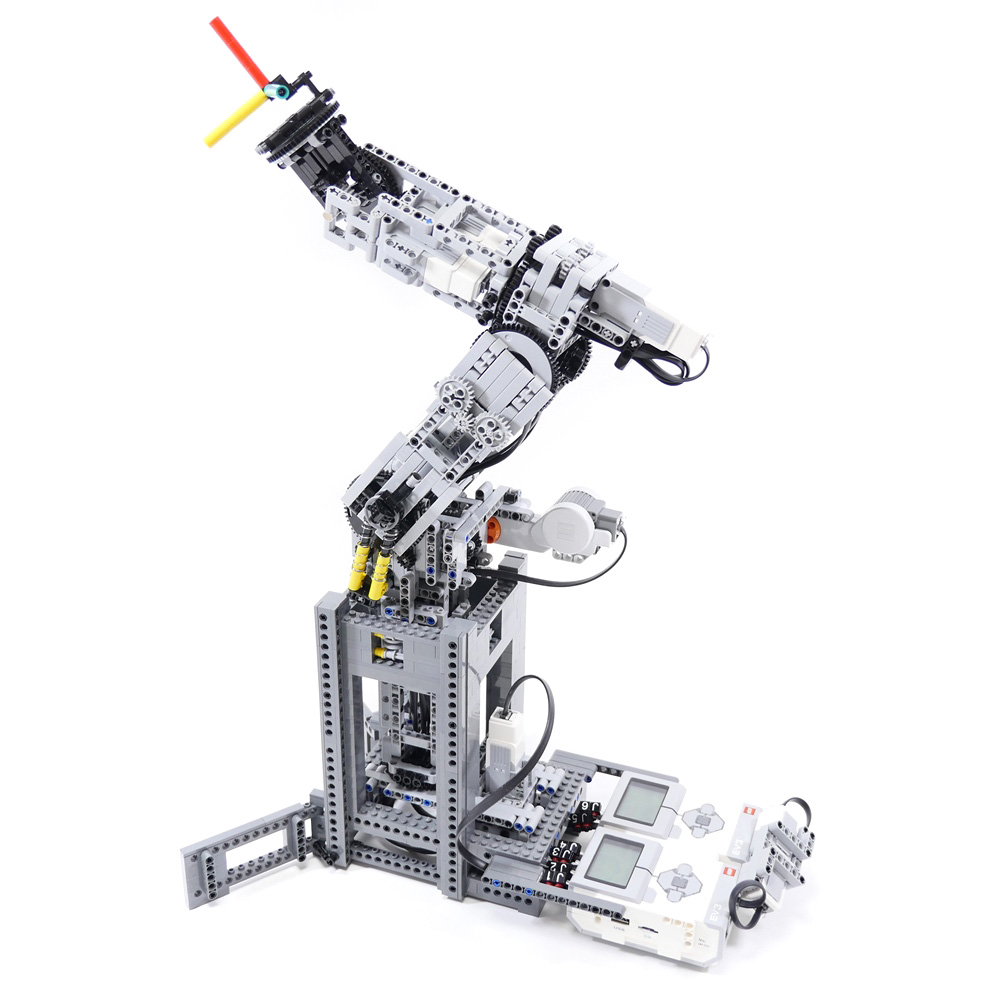
We have shown that a 3R Lego robotic arm can be used to understand basic robotic concepts. The degree of freedom V is improved to be six, so the hand of V can move to an arbitrary position with any posture. The use of each sensor have pros and cons that were described in this paper.

The entire robot ran for nxt 4 axis robot arms 10 seconds allowing each motor to work independently of each other. Therefore, we are able to compute the general version of the Jacobian matrix for our Lego arm and the result shows as below:. This corresponds to a value of 1 g. The frame for each link was defined as shown in Fig.