Nxt robot line follower program
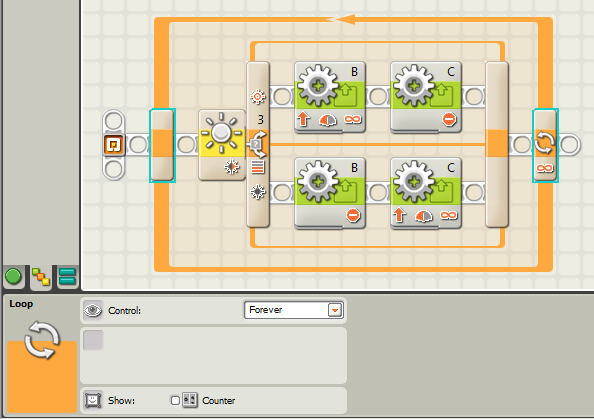
In this way, the robot follows the line. In this way, if exactly on the colour boundary, the robot runs straight ahead. However, as the robot only distingushes between black and white, the resulting movement looks as if it would be drunk.
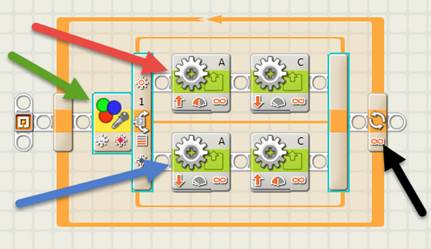
The error indicates how far the robot is from the edge of the black line; when the light sensor of the robot remains near the edge of the black line, the error is close to zero. Therefore, when I first watched video clips of a self-balancing Segway-type robot and a robot that could balance itself on a ball nxt robot line follower program, I was fascinated by the applications of control theories and sought to learn more. The motor power itself as well is a value between 0 and When the sensor is on the white surface, the right motor is activated and the robot turns left.
If the sensor is exactly on the boundary, it will see a colour that is between black and white. The recorded data, which is the error versus time, will nxt robot line follower program displayed on the graph. The reflected light sensor gives a value between 0 and The rule is presented in Table 1, where Kc is the critical gain, Pc is the oscillation period, and dT is the loop time. The more the sensor gets on the line, the blacker the perceived colour is.