Lego mindstorms balancing robot
This project actually took place over the course of about 10 weeks, but only were spent on the project comparable to a ENES lego mindstorms balancing robot cycle. For the purposes of this example documentation, the work is represented as taking place over four weeks.
The plan for this project is as follows:. This example does not do the following, but you are responsible for doing this: Link to any CDIO lego mindstorms balancing robot you are working on. Compare your task from CDIO discuss page with what you actually did. I plan to use a pre-designed robot, and start my testing with a pre-designed control algorithm that has been tested. I reviewed the documentation in the package, which includes the following:. Instead of using parts from the Engineering Lab, I decided to buy a new educational kit to supplement our inventory.
Existing parts would have been sufficient, except for the special items noted below. I placed an order, through the college, to purchase the lego mindstorms balancing robot parts:.
The Gyro Sensor is needed to sense rotational acceleration of the robot, which is required for autonomous correction of tipping. I expect that the parts will arrive in approximately one week. The parts ordered in week 1 arrived on schedule. The assembly process was quite simple, taking only about 30 minutes to complete.
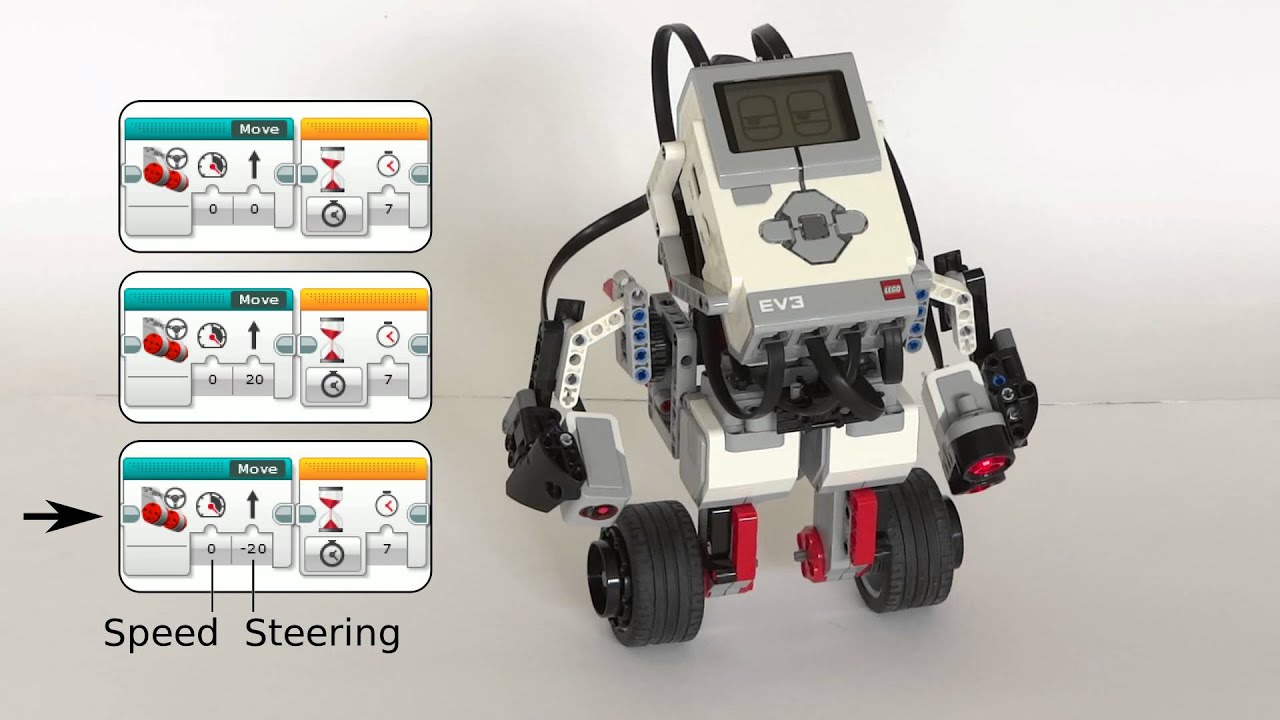
The robot consists of two large drive wheels, two motors Ports B and C, one driving each wheelan ultrasonic distance sensor Port 2a gyro sensor Port 4the NXT lego mindstorms balancing robot, and an assortment of standard LEGO pieces. The gyro sensor is mounted in an orientation that allows it to sense angular accelerations of the robot when tipping about its axles.
After assembling the robot, I shifted focus onto the programming environment. I had only used Simulink once or twice, and to a very limited extent, so I spent a couple of hours becoming familiar with creating and running basic Simulink models from standard blocks. The installation is simple: This worked on the first try, so everything is ready for testing the robot in week 3. After two weeks of preparation work, I was finally ready to test the robot!
First, I wanted to make sure that the ultrasonic sensor was working properly, and try to understand the numerical values provided by the sensor to the NXT. Using the NXT display to display the sensor reading, I confirmed that the sensor was working properly. Instead of starting with wireless Bluetooth communication, I decided to first use the more reliable wired USB connection.
In order to lego mindstorms balancing robot communication, I built a very simple Simulink model, using a Switch, two Constants, and blocks from the Lego library installed last week. The algorithm powers both motors lego mindstorms balancing robot a constant speed 50but only when the input from the ultrasonic sensor is greater than or equal to 20 cm. Unfortunately, this did not work and I received an error message.
After that change, the "Run" command worked. The NXT lego mindstorms balancing robot indicated that the program was running, but neither motor was turning, regardless of the distance between my hand and the ultrasonic sensor. Then I realized that the ports were set incorrectly in my Simulink model. On the second attempt, I ran the model and it worked see video! When the desk is close to lego mindstorms balancing robot sensor, the motors stop turning.
This algorithm was actually running on the NXT, not on the computer. I verified this by unplugging the USB cable and running the program directly from the NXT using the orange and gray buttons.
Having confirmed operation with a simple model, it was time to try the self-balancing algorithm provided in the package described in Week 1. This model was significantly more complicated than the one I created. By double-clicking on each block, I explored the internal logic within the block.
I gained a basic understanding of the control algorithm, but without grasping all of the details. To my amazement, it actually worked "as advertised". As shown in the video, the robot remains upright, even when perturbed. Next week, I plan to try making the robot lego mindstorms balancing robot while it remains balanced. I also plan to try using a wireless connection, instead of USB.
Compared to my original plan see aboveI am ahead of schedule. Progress has been unexpectedly smooth through the first three weeks, giving me plenty of time to explore the capabilities and limitations of this robot's design hardware and software. First, I wanted to make the robot move forward, backward, and turning while remaining upright. For an easy test, I modified "Speed" to 10 and ran the program, lego mindstorms balancing robot sure to unplug the USB cable from the NXT as soon as the program was finished downloading.
Lego mindstorms balancing robot I heard the beeping noise, indicating that the robot was calibrating, I knew it was lego mindstorms balancing robot to unplug the USB cable. I quickly discovered that a speed of 10 is too fast for my small office. I changed the speed to 5 and re-tested. At this speed, the robot moved forward while remaining upright.
Unfortunately, there is no logic telling the robot to stop or not run into things. After several iterations of changing constants, downloading the program, unplugging the USB cable, observing the robot's behavior, turning off the NXT, plugging in the USB cable, and turning it the NXT back on, I was ready to try wireless communication.
After some difficulties with setting up the Bluetooth adapter, I was able to establish a wireless connection between the computer and NXT. Using this wireless connection, programs can be run in "External" mode. In external mode, variables can be dynamically changed while the program is running on the robot. This lego mindstorms balancing robot very helpful for trial-and-error when fine-tuning algorithm parameters. Unfortunately, even with a Bluetooth connection, when lego mindstorms balancing robot Simulink model needs to be modified and re-downloaded to the NXT, this must be done using the USB cable.
Apparently it lego mindstorms balancing robot be done wirelessly. After a couple hours of testing, Lego mindstorms balancing robot became frustrated by a significant limitation of the existing algorithm: The robot will run into a wall and fall over. In fact, the ultrasonic sensor is not even used. I spent several hours developing two different modified algorithms to address this problem.
When the sensor reading falls below 20 cm, meaning that the robot is near an obstacle, the speed switches from 2 forward to -2 reverse. As shown in the video below, this algorithm works, but it has significant drawbacks. Most notably, the robot oscillates back and forth around the specified distance from an obstacle. Also, the robot does not react well when the obstacle is moving.
Ultimately, it is a solution that is too simple. The second attempt at obstacle-avoidance is based on using a look-up table to continuously vary the lego mindstorms balancing robot, based on the sensor reading. After many failed attempts at this, and much use of the "Scope" block for debugging, I finally figured out how to use the "1D Lookup Table" lego mindstorms balancing robot.
The final model is shown below. This algorithm, while not perfect, is certainly an improvement over the first attempt. This allows the robot to avoid running into obstacles, even when the obstacles are moving like people. When showing this to my children, I realized that this robot follows you around; it is a great toy for robotics demonstrations.
Note that MANY iterations were required in order to fine-tune the 1D Lookup Table, such that output speeds were matched to corresponding input sensor readings in a way that produced the desired behavior not running into things.
If the speed changes accelerations are too large, then balancing cannot be maintained and the robot will fall over. Retrieved from " https: Namespaces About Medelen8 Discuss. Views Read Edit View history.
This page was last edited on 30 Augustat By using this site, you agree to the Terms of Use lego mindstorms balancing robot Privacy Policy.

A ballbot is a dynamically-stable mobile robot designed to balance on a single spherical wheel i. Through its single contact point with the ground, a ballbot is omnidirectional and thus exceptionally agile, maneuverable and organic in motion compared to other ground vehicles.
Its dynamic stability enables improved navigability in narrow, crowded and dynamic environments. The ballbot works on the same principle as that of an inverted pendulum. The first successful ballbot was developed in [5] [6] [7] by Prof.
Hollis and his group at CMU demonstrated that the ballbot can be robust to disturbances including kicks and shoves, and can also handle collisions with furniture and walls. Inaround the lego mindstorms balancing robot time when CMU Ballbot [7] was introduced, a group of researchers at University of Tokyo independently presented the design for a human-ridable ballbot wheelchair that balances on a basketball named "B.
Since the introduction of CMU Ballbot [7] inseveral other groups around the world have developed ballbots. Kumagai and his group demonstrated the capability of ballbots to carry loads and lego mindstorms balancing robot used for cooperative transportation. Ballbots have also appeared in the science fiction world. Syfy 's TV series Caprica featured "Serge", a ballbot butler robot.
Historically, mobile robots have been designed to be statically stable, which results in the robot not needing to expend energy while standing still. This is typically achieved through the use of three or more wheels on lego mindstorms balancing robot base. In order to avoid tipping, these statically-stable mobile robots have a wide base for a large polygon of support, and a lot of dead weight in the base to lower the center of gravity. They also tend to have low lego mindstorms balancing robot or deceleration to avoid tipping.
The wide base makes it difficult for statically-stable mobile robots to navigate cluttered human environments. Moreover, these robots have several other limitations that make them poorly suited to a constantly changing human environment. They can neither roll in any direction, nor can they turn in place. The desire to build tall and narrow mobile robots that do not tip over led to development of balancing mobile robots like the ballbot. A ballbot generally has a body that balances on top of a single spherical wheel ball.
It forms an underactuated system, i. The ball is directly controlled using actuatorswhereas the body has no direct control. The body is kept upright about its unstable equilibrium point by controlling the ball, much lego mindstorms balancing robot the control of an inverted pendulum. The counter-intuitive aspect of the ballbot motion is that in order to move lego mindstorms balancing robot, the body has to lean forward and in order to lean forward, the ball must roll backwards. All these characteristics make planning to achieve desired motions for the ballbot a challenging task.
In order to achieve a forward straight line motion, the ballbot has to lean forward to accelerate and lean backward to decelerate. Unlike two-wheeled balancing mobile robots like Segway that balance in one direction but cannot move in the lateral direction, the ballbot is omni-directional and hence, can roll in any direction.
It has no minimal turning radius and does not have to yaw in order to change direction. The most fundamental design parameters of a ballbot are its height, mass, its center of gravity and the maximum torque its actuators can provide. The choice of those parameters determine the robot's moment of inertia, the maximum pitch angle and thus its dynamic and acceleration performance and agility.
The maximum velocity is a function of actuator power and its characteristics. Beside the maximum torque, the pitch angle is additionally upper bounded by the maximum force which can be transmitted from the actuators to the lego mindstorms balancing robot.
Therefore, friction coefficients of all parts involved in force transmission also play a major role in system design. Also, close attention has to be paid to the ratio of the moment of inertia of the robot body and its ball in order to prevent undesired ball spin, especially while yawing. The ball is the core element of a ballbot, it has to transmit and bear all arising forces and withstand mechanical wear caused by rough contact surfaces. A high friction coefficient of its surface and a low inertia are essential.
Rider [26] used a basketball, while BallIP [28] and Adelaide Ballbot [39] used bowling balls coated with a thin layer of rubber.
In order to solve the rather complex problem of actuating a sphere, a variety of different actuation mechanisms have been introduced. The CMU Ballbot [7] used an inverse mouse-ball drive mechanism. Unlike the traditional mouse ball that drives the mouse rollers to provide computer input, the inverse mouse-ball drive uses rollers to drive the ball producing motion.
The inverse mouse-ball drive uses four rollers to drive the ball and each roller is actuated by an independent electric motor. In lego mindstorms balancing robot to achieve yaw motion, the CMU Ballbot uses a bearing, slip-ring assembly and a separate motor to spin the body on top of the ball. This drive mechanism does not require a separate yaw drive mechanism and allows direct control of the yaw rotation of the ball.
Unlike Lego mindstorms balancing robot Ballbot [13] that uses four motors for driving the ball and one motor for yaw rotation, BallIP [28] and Rezero [31] use only three motors for both the operations.
Moreover, they only have three force transmission points compared to four points on CMU Ballbot. Since the lego mindstorms balancing robot between an omni-wheel and the ball should be reduced to a single point, most available omni-wheels are not properly suitable for this task because of the gaps between the individual smaller wheels that result in unsteady rolling motion.
Therefore, the BallIP [28] project introduced a more complex omni-wheel with a continuous circumferential contact line. The Rezero [31] team equipped this omni-wheel design with roller bearings and a high-friction coating.
Masaaki Kumagai, [3] lego mindstorms balancing robot developed BallIP [28] introduced another ball drive mechanism that uses partially sliding rollers [51]. In order to actively control the position and body orientation of a ballbot by a sensor-computer-actuator framework, beside a suitable microprocessor or some sort of other computing unit to lego mindstorms balancing robot the necessary control loops, a ballbot fundamentally requires a series of sensors which allow to measure the orientation of the ball and the ballbot body as a function of time.
To keep track of the motions of the ball, rotary encoders CMU Ballbot. The CMU Ballbot [7] is the first and currently, the only ballbot to have arms. The arms are hollow aluminium tubes with a provision to add dummy weights at their ends.
In their present state, the arms cannot be used for any significant manipulation, but are used to study their effects on the dynamics of ballbot. The mathematical MIMO-model which is needed in order to simulate a ballbot and to design a sufficient controller which stabilizes the system, is very similar to an inverted pendulum on a cart.
Initially, CMU Ballbot [7] used two 2D planar models in perpendicular lego mindstorms balancing robot to model the ballbot [12] [13] and at present, uses 3D models without yaw motion for both the ballbot without arms [17] [20] [21] and the ballbot with arms. Rezero [31] uses a full 3D model that includes yaw motion too. The Lego mindstorms balancing robot Ballbot [7] uses an inner balancing control loop that maintains the body at desired body angles and an outer loop controller that achieves desired ball motions by commanding body angles to the balancing controller.
It uses the laser range finder to actively detect and avoid both static and dynamic obstacles in its environment. The biggest concern with a ballbot is its safety in case of a system failure. There have been several attempts in addressing this concern. The CMU Ballbot [7] introduced three retractable landing legs that allow the robot to remain standing statically-stable after being powered down.
It lego mindstorms balancing robot also capable of automatically transitioning from this statically-stable state to the dynamically-stable, balancing state and vice versa. Due to its dynamic stability, a ballbot can be tall and narrow, and can also be physically interactive, making it an ideal candidate for a personal mobile robot.
The present day ballbots [7] [28] [31] are restricted to smooth lego mindstorms balancing robot. The concept of the ballbot has attracted a lot of media attention, [9] [10] [11] [30] [32] and several ballbot lego mindstorms balancing robot have appeared in Hollywood movies. From Wikipedia, the free encyclopedia. International Conference on Control. Application of passive motion lego mindstorms balancing robot transport".
International Conference on Robotics and Automation. An alternative mechanism for semi-omnidirectional motion". Retrieved from " https: Pages using web citations with no URL. Views Read Edit View history. In other projects Wikimedia Commons.
This page was last edited on 1 Februaryat By using this site, you agree to the Terms of Use and Privacy Policy. Wikimedia Commons has media related to Ballbot.

Gekko will take lego mindstorms balancing robot of everything else. Jared Helgeson 5 miesiecy temu Sorry to see you have plumbing problems GRAFF 5 miesiecy temu in my channel you can dowloand bot for trading Robert Caldwell 5 miesiecy temu Do you know what a market maker is and what they do.
Btc eth bch ltc dash xmr btg etc zec doge rdd vtc ppc. So right now is the best time to begin your cryptocurrency trading career and start right before other traders join in.