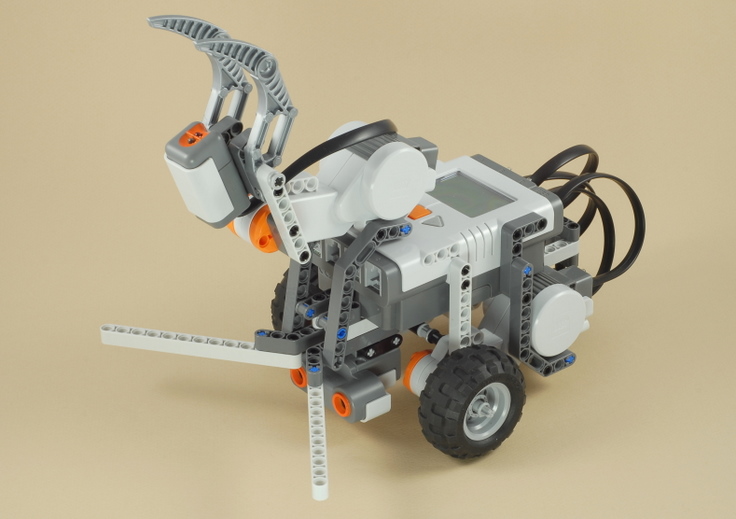
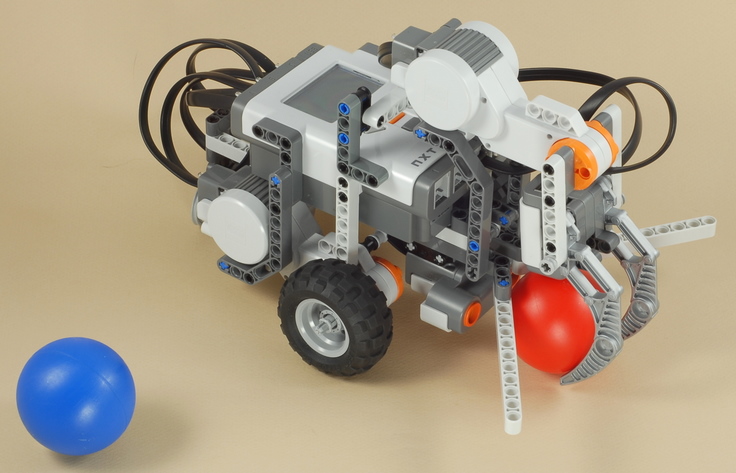
Lego NXT Ball Grabber
4 stars based on
65 reviews
For all those who might assume that mobile robotics is not something the average Java programmer can readily explore, you have to experience the LEGO Mindstorms Robotics Invention System. The brick is a small and extremely resource-constrained computing device -- particularly by today's desktop standards of GHz processors and hundreds of Mb of memory.
The system can process over commands a second, and features a fully multitasking operating system allowing up nxt robot pick up ball ten simultaneous tasks. The brick was initially designed by LEGO to be programmed via a PC-based system that allows the visual assembly of on-screen functional components. This component-driven system then generates a completed program that can be downloaded into the brick.
But what opened the brick up to whole new vistas of innovation and functionality was the development of the open source leJOS environment. But leJOS is obviously not a complete implementation of the Java platform. With leJOS, Java developers now have an inexpensive yet multi-threaded robotics platform available to them. In order to accommodate future versions of the brick, the system was designed to allow for the easy loading of new LEGO firmware.
But that also makes it very simple to replace the firmware with the leJOS environment. The first step toward enabling the brick to run Java programs is to load leJOS. This entails stripping out any unnecessary information.
But with a five-character LCD display as the only output device, debugging programs can sometimes be challenging! There are currently three versions of the RCX brick. The RCX version 2. In May ofthe Java technology evangelists nxt robot pick up ball Sun staged a competition at Bay Area universities to see who would come up with the most innovative LEGO brick robot.
And UC Berkeley developed the winning entry, the "PaperBot," a robot that selected and sorted paper by color. Stanford's Maze Solving MazeBot. One of them, a LEGO brick on wheels, was programmed to detect nxt robot pick up ball follow an irregular black trail on a field of white. The system recognizes commands, vocalizes activities, and visually interprets dealt hands. Player gets six of spades," it says. With the limited processing constraints of the LEGO brick, for many of Ritter's demonstration robots, it's not feasible to have all of the functionality located entirely on the brick.
On the other hand, the brick is being utilized as far more than just a PC-controlled set of motors. But it's up to the LEGO to figure out how to actually get the ball, pick it up, and bring it back.
Plus, it has to remember its position, so that it knows how to get back to the starting point. While the speech synthesis and visual processing is being handled on the PC, the brick is handling the movement of all the motors, figuring out where the card is in the machine, and so forth. And such systems really do seem to have a life of their own nxt robot pick up ball times. While detailing a technical aside during the SunNetwork Conference demonstration, Ritter forgot that the dealer-bot was still in command mode.
Assuming it was being spoken to, the robot responded -- "Sorry, you must ask me nxt robot pick up ball deal a hand of cards first. Newer links Some links to existing program development sites include: There's a pile of open-source and other stuff on robots.