Date: 18/04-2013-24/04-2013
4 stars based on
65 reviews
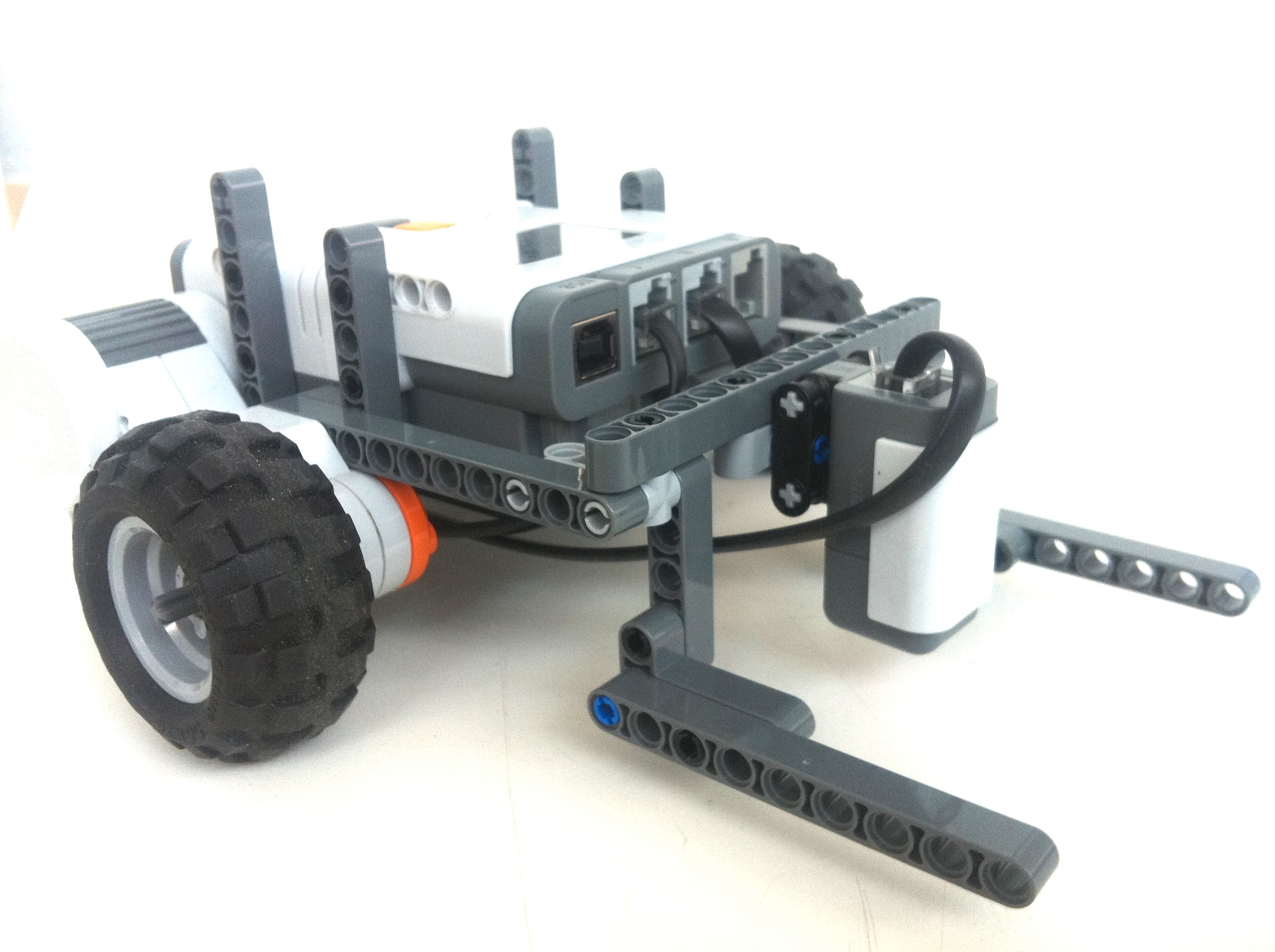
The broken part I was referring to in the video were the linear actuators. The robot currently has 2 Fergelli actuators. The rear of the actuator has plastic bits to interface the actuator into a Technic creation. Turns out if you ram the robot into something, it jerks the affected module around and snaps those important plastic bits on the actuator. Before that happened, groups of little kids were taking turns playing with the robot.
I had hordes of little kids and parents intrigued with the robot for several hours. This robot has had a long time in the making. The goal is to navigate around a closed obstacle course autonomously. The minimum size of an entry must be 2 feet by 3 feet. I nxt sumo bot pusher trilogy to make a remote control system for the robot to be able to test the mechanical systems.
In particular, I need to test the suspension, speed, torque, durability, and other offload qualities of the design. I needed a system that was able to talk to each NXT quickly and efficiently. Each of the six wheel modules has an NXT that is associated with the wheel module. Each NXT has two light sensors. One light sensor triggers the NXT to power its wheel forward, and the other light sensor triggers the NXT to power its wheels backward.
Two of the six NXTs have an additional two light sensors which are used trigger a Fergelli linear actuator in the same manor. They can be found here: Some video to follow.
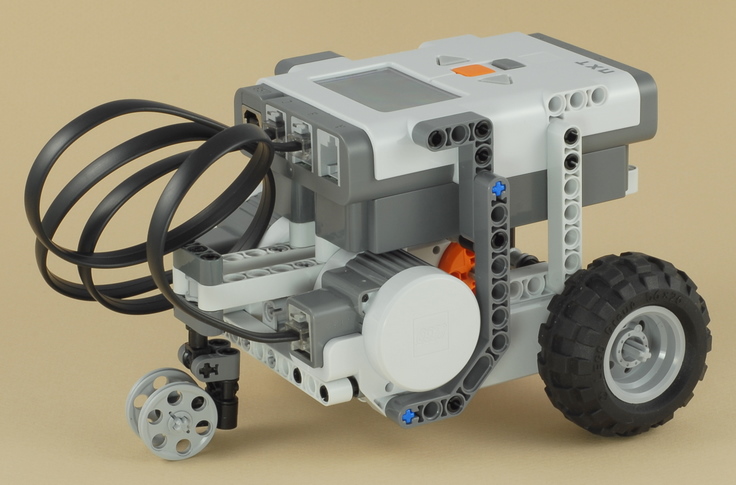
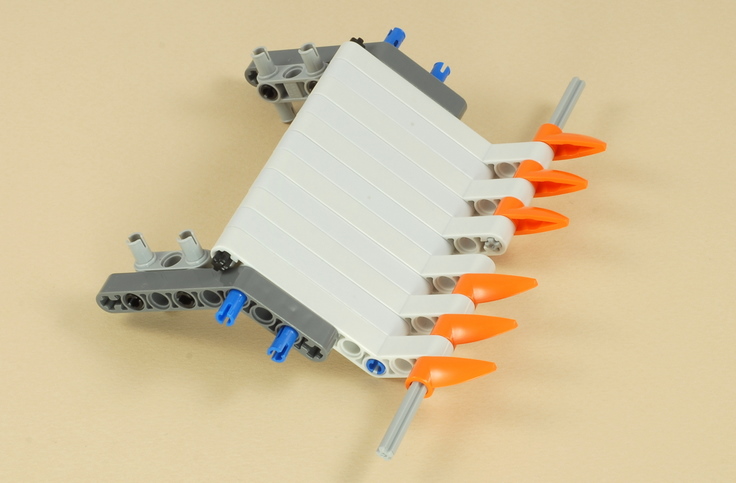
My sumo robot is a rather simple robot. It was inspired by my friend Peter Ehrlich. The Kinzie version is streamlined and simplified while retaining all of the unique nxt sumo bot pusher trilogy. The drive train also uses a similar gearing set up, and placement of the motors. The plow on the the Kinzie sumo robot is constructed differently than Peters. The Kinzie sumo robot uses an ultrasonic sensor, which is embedded in its plow, to detect the opponent, and a light sensor just behind the plow to nxt sumo bot pusher trilogy the edge of the ring.
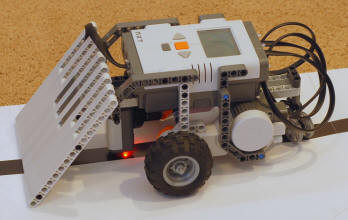
It is programmed in NXT-G. The program starts off my making the robot turn to find its opponent. Nxt sumo bot pusher trilogy the ultrasonic sensor detects a robot within 15 inches, it moves the robot forward to push the opponent.
Meanwhile, if the robot detects a white line with its light sensor, it backs up, turns, and then continues to look for an opponent.